This note outlines the subject and the questions it raises.
Later articles linked at the end present some of the answers.
Later articles linked at the end present some of the answers.
There are two kinds of electronic charts of US waters, both free downloads from NOAA. Raster Navigation Charts (RNC) and Electronic Navigation Charts (ENC). There is nothing strange about the RNC. They are graphic images of the latest paper chart of the same name, with the same boundaries. When first getting into electronic charting, the RNC style is most likely the best to start with. The charts look exactly like the ones we are used to.
The RNC do have the advantage over their paper parents of always being the latest edition, never older than about 10 days. We might be reluctant to spend another $28 or so on a new printed chart every time there are new editions or corrections, but with the RNC we can just click a button (when online) and it will be automatically updated in our navigation programs—at least in full feature programs such as Rose Point's Coastal Explorer.
Eventually, however, we will want to broaden our charting interface to include the vector displays of the ENC. There are several reasons for that. In some cases, there are no RNC counterparts at the scale we want. Also, in principle the ENC can include much more information because they include multiple layers of data. Not all versions include anywhere near their full potential in that regard, but it is possible, and also in principle these just get better with time. The land outlines and ATON detail improve with each new version. They too are updated about every 10 days or so, but like the RNC they actually change much less frequently than that.
That is not to say there are not drawbacks to the ENC. They call for new approaches to chart reading, and even though in use more than ten years now, they are indeed still evolving—and in the words of NOAA, sometimes "a little rocky." Nevertheless, they were just last week or so, approved as meeting chart carriage requirements on some vessels.
 |
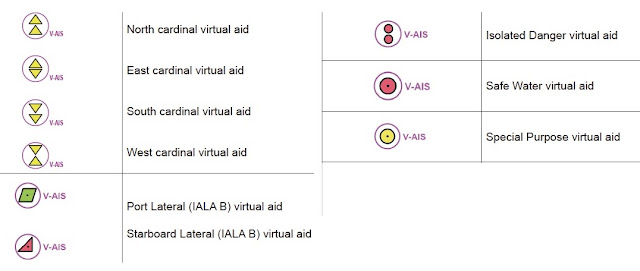
| From the latest edition of Chart No. 1. |
Another feature of ENC that could be an advantage to some users, while at the same time considered a drawback to others, is each user can redesign the layout. You can change the depth contours and water colors, show or hide various labels, choose optional symbol patterns, and change the style of boundary lines, among other things. Thus you can customize the look of the chart for special applications, whereas some users might consider that having invariant display standards is crucial to safe navigation when multiple navigators use the chart.
Beyond these pros and cons—subject for another article—there is a further call for ENC in that some tactical navigation programs whose main function is performance analysis and weather routing are often better run on the digital vector charts (ENC or equivalent) rather than on the large image files of the RNC. In short, there are various reasons we might want to use the ENC.
And with that brief background, we come to the topic at hand. The moment you decide to use the ENC for any reason, you discover a logistics issue that might not have been anticipated. Namely the chart numbering system defies immediate logic, and the chart boundaries are irregular at best.
The examples given here are for Puget Sound, but the points being made apply to any US Waters.
Suppose you want to look at the ENC equivalent of 18474, Puget Sound–Shilshole Bay to Commencement Bay. You will find this chart on the NOAA Interactive Catalog, ENC section, and it is called US5WA18M, and it is indeed described as equivalent to 18474, Puget Sound–Shilshole Bay to Commencement Bay. The actual ENC situation, however, is illustrated below.
We see that ENC chart US5WA18M (the green part alone in Figure 1) does not at all cover the same waterway. Furthermore, if you do want all the ENC charting that covers the waters of 18474 you will need 6 ENC charts. There must be some logic to the boundaries, but it is not obvious, nor predictable. Also, once these are all loaded into your program, it is only the US5WA18M that will describe itself (incorrectly) as "Puget Sound–Shilshole Bay to Commencement Bay." (We come back to the logic in a later note.)
Also the scales of adjacent charts do not match in the same way many RNC do. In RNC we often have a sequence of neighboring charts on the same scale, say 1:40,000 or even 1:25,000, but this is not the case with the ENC. The RNC of 18474 is 1:40,000. The ENCs that cover this chart area vary from 1:15,000 to 1:80,000.
With vector charts (ie ENC), however, the disruption going between adjacent charts of differing scales in a quilting display is not as often an issue as it can be in some RNC displays, so these scale differences are not a major issue, and indeed a virtue on some level.
Unlike RNC, there is much less likely to be any overlap between adjacent charts; they typically (not always) end right where the neighboring chart begins, but there can be ENC inserts, wholly within a smaller scale ENC chart.
But there can be other surprises, as we see in this same type of comparison for RNC 18465, Eastern Strait of Juan de Fuca.
 |
| Figure 1. The ENC charts that cover the same waters as RNC 18474. Numbers in parentheses are what the ENC call the equivalent RNC. |
 |
| Figure 2. The ENC charts that cover the same waters as RNC 18465. Note there is no US ENC coverage just south of Victoria. Numbers in parentheses are what the ENC call the equivalent RNC. |
This is a popular sailing area in the Pacific Northwest, and waters of several yacht races. Here we see that that the waters of RNC 18465 is spanned by 8 ENC segments. The irregular blue section is the one NOAA calls equivalent of 18465. This is quite a hodge-podge, but rather worse than that is the waters of Victoria Harbor leading out to Race Passage is not covered by any of the US ENC charts. Simply knowing that fact can save much puzzlement when using ENCs in this region.
The way around these issues in a basic chart program such as OpenCPN is to be sure to load all the ENC over the broad region you are sailing in. Then most programs will quilt and load these as needed, without you having to figure out which ones you actually need based on the chart name they present, which, as noted above, will not be logical very often.
This too points out a good selling point to look for when shopping for an echart program, especially looking forward to using ENC. A full-feature program will actually let you download the charts from within the program itself. Rose Point's Coastal Explorer, for example, has an especially nice way to do this by presenting to you the same ENC outlines you see on the NOAA Interactive Catalog. So you can just click the ones you want, see them highlighted to confirm their coverage, and then install.
We cover the use of all echart formats in our online course on coastal navigation with illustrations using both OpenCPN and Coastal Explorer.
The video below shows how each of these programs end up presenting us with sometimes misleading descriptions of these ENC... at least until we learn more of the naming conventions.
* * *
UPDATE 3/6/16.
Answers to several of the questions raised above have now been posted here:
Naming and Boundary Conventions on ENC eCharts.