
To plan out such a pattern you need to know your (1) initial heading, (2) the distance you want between the squares, (3) your boat speed, and (4) the time you plan to start.
In one sense, the next logical step is turn to your electronic charting program, put in the way points, select an average speed and start time, and look at the resulting route plan, which will tell you the headings and times to turn onto each leg. Then print that plan or take a picture of it with your cellphone. In fact, the route itself will be laid out on the chart plotter and you can just follow it.
Or you could simply start off with the boat's track showing, and create the route from your displayed and saved vessel track... But that is not the point at hand. Several agencies, including the USCG who certify assist vessels require that you solve this manually, without relying on any electronics, and we can't truly fault them for that. We want this done right, and we don't want it fouled up if the electronics hick up, or we accidentally push the wrong button on some display.
A device for doing this is offered by Weems-Plath.com called the #113 Course and Leg Identifier, and this note explains how to use that. The instructions that come with the device are sparse and strangely enough several other descriptions of the device I have seen do not add to it. So we were happy to add a few notes on this when asked.
Below is a picture of the device. The middle disk rotates so you can point it in the initial heading of the search pattern, in this example 030. This device implies this will be on a heading that is a multiple of 15º, but it does not matter if you use true or magnetic headings for this.

For higher res image, click above, then right click and choose open in new tab,
then click that for a big picture of the device.
Or download pdf of this note.
then click that for a big picture of the device.
Or download pdf of this note.
Procedure
Step 1. Point the track to your initial heading in multiples of 15.
Step 2. Choose your track spacing and boat speed, and enter the table (bottom left) of times for various leg separations and boat speeds. In the example used here, we choose legs 1 mile apart with a vessel speed of 10 kts. This gives us a time increment of 6 min. Had we chosen a separation of 1.5 miles with a boat speed of 12 kts, the tine interval would be 7m 30s.
[This is just the boat speed in minutes per mile (60/S) multiplied by the distance run.]
This 6 min the main time interval used to figure the times for each turn. Each leg has a multiplier on it. For leg 5 this is x3. See green circles in the figure.
Step 3. Mark the start time at the base of leg 1, and then compute the turn times for each leg and write them with pencil in the spaces provided as shown. Pencil marks on this disk can be erased for later use.
This step takes some care as mistakes are easy, so double check your work. Then you head off on the headings indicated and turn at the times you have marked.
Obviously, if you do have a chart plotter, watch it to be sure you are making a square search pattern. Current or leeway could through this off—but that is a feature, not a bug, as discussed at the end of this note.
Below is this example, roughly laid out in OpenCPN (ie legs and headings not precisely set; just click, click, click...) and the corresponding route plan, which can be used to check if we were right with the Course and Leg Identifier.


After publishing this note, we received a valuable comment from an experienced user. This is reproduced below (with annotation), and it is now in the pdf copy of this article.
Just wanted make a correction to the use of the expanding square (SS) and the sector (VS) search patterns. Both these patterns are intended to be drifting patterns as such they are never plotted on a chart or ECS. They are driven purely by stopwatch and compass. The distortion of the pattern by the on scene drift is actually desirable as your search object is also drifting.
(The track of past positions will automatically be drawn on any echart program and these are valuable to monitor. The commenter's point is we are better off doing this by DR alone and not by course and speed over ground if there is any set or leeway.)
When you arrive at the last known position of a vessel and she’s not there, you have to assume you are looking for people in the water.
Use that as your first leg course, then set off at clutch ahead and one minute legs.
The length of each leg is largely determined by sea conditions and your range of clear visibility.... and we do indeed want to have the current and leeway in mind. A person in the water will drift with the current, but will not be affected by leeway as much as the searching vessel will be.
Software solutions
The extensive package of free navigation apps by Andres Ruiz González called Navigation Algorithms has a dedicated section on search and rescue patterns. Samples are shown below.
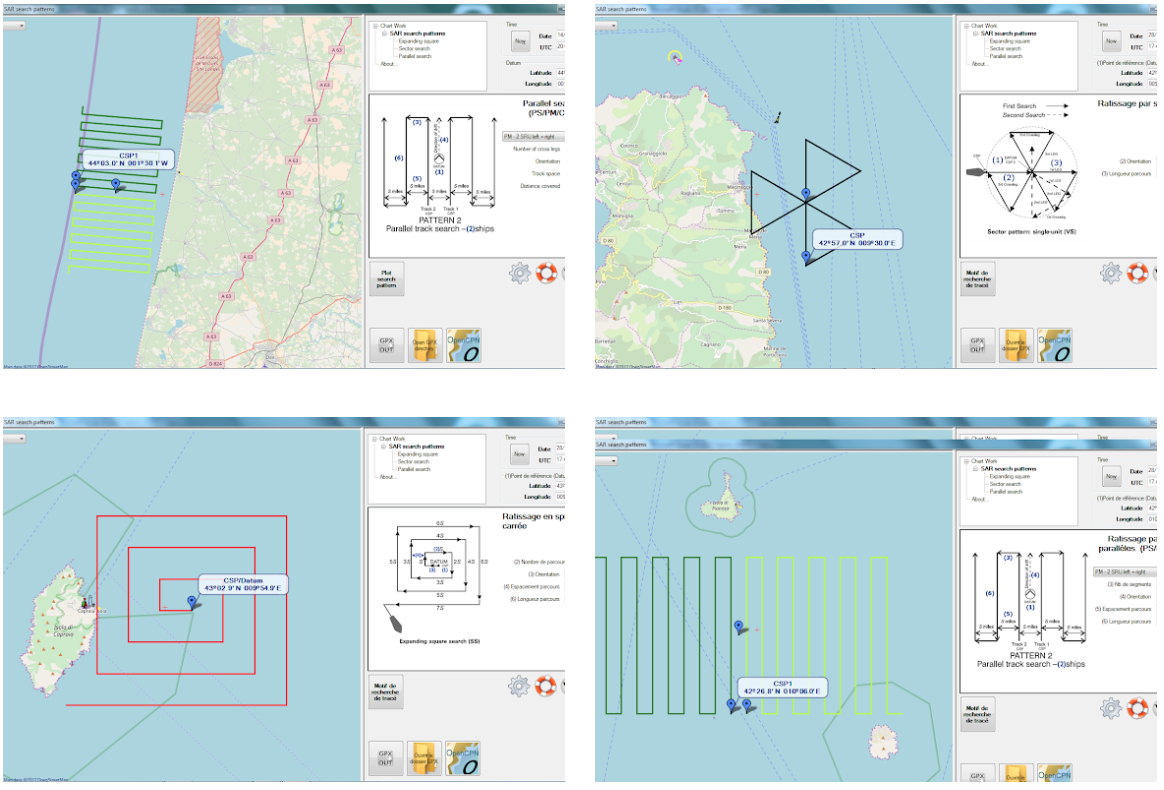
These patterns are computed and then exported as GPX files for the navigation GPS unit, as noted above. However, in strong current, the DR method directly should be considered because the target will be drifting with the current.
Hello Dave,
ReplyDeleteI was cruising through your blog this morning and came across this post about the weems search pattern calculator.
Just wanted make a correction to the use of the expanding square (SS) and the sector (VS) search patterns. Both these patterns are intended to be drifting patterns as such they are never plotted on a chart or ECS. They are driven purely by stopwatch and compass. The distortion of the pattern by the on scene drift is actually desirable as your search object is also drifting.
Another idiosyncrasy of this tool worth mentioning is the proper track spacing for a man in the water is not on the table .1 nm or 200 yards. Which is achieved by 1 minute legs at 6 knots which is the clutch ahead speed for a lot of power driven vessels.
When you arrive at the last known position of a vessel and she’s not there you have to assume your looking for people in the water.
Take a minute to determine the set. There’s a lot of ways but COG from the gps when DIW is quick
Use that as your first leg course
Then set off at clutch ahead and one minute legs.
Usually the sector pattern is done first, start and end positions compared to get a more accurate set then a expanding square using that data.
I really enjoy the blog and frequently recommend Starpath books and courses to shipmates that want to learn cell nav.
Thanks very much. I apologize for the delay in responding. It seems i was not getting any emails about comments, and comments were being held for monitoring.
ReplyDeleteYour comments are extremely valuable. i will add them to the body of the article so they then become part of the pdf version of the note.
thanks again
I haven't heard the term "set off at clutch ahead" before. Does that relate to speed in any way?
ReplyDeleteIt's important because, adding to what your other contributor said, those patterns are driven by stopwatch and compass and speed through the water (STW)
A constant STW is the other important factor in allowing your search to drift along with the water mass (this drift which is vital, as your other contributor rightly said). Aim to maintain a constant engine speed rather than a constant Speed Over Ground (SOG).
So, to summarise, for area searches (such as expanding square search and sector search), you need:
- stopwatch; and
- compass course (not Course Over Ground); and
- speed through the water (not Speed Over Ground)
Ironically, the drift can present a new risk - when following a search pattern that drifts with the water, you must still be aware of land, rocks etc. Make sure that the drift doesn't take you into danger.