When we are underway, we measure the apparent wind speed (AWS) with an anemometer and the apparent wind angle (AWA) relative to the bow with a wind vane. We also read the heading of the bow (HDG) with a heading sensor and the speed through the water (STW) with the knotmeter. In the presence of leeway (LWY), the course through the water (CTW) is found from CTW = HDG + LWY, where we can either measure the LWY separately or estimate it from the heel angle and STW.
Thus we can find the apparent wind direction (AWD) from AWD = CTW+AWA, and from this we can solve for the true wind speed (TWS) and true wind direction (TWD), as shown below.

The navigator and tactician, on the other hand, have the job of planning the route ahead, so they need to know if the wind we are experiencing now is what the forecasts said it will be, and they need to know if the changes in the wind that have taken place are consistent with the forecasts. To do this, they cannot use the same "true wind" that the trimmers use, unless the (COG and SOG) vector is the same as the (CTW and STW) vector. These two vectors can differ for a lot of reasons, including instrument calibration and steering bias, but the usual cause in a well founded vessel is actual motion of the water, currents.
The wind in the forecasts is "ground wind," meaning it is relative to the fixed earth, the ground. The true wind on the left above is relative to the water, and if that water is moving the ground wind will not be the same as the true wind. It is usually not a big difference, but it can be big, and even in cases where it is a small difference, this difference could mask a notable change in the weather. Thus it is best to have two sets of records (histograms), one of true wind and one of ground wind.
A change in the true wind alerts the helmsman that a new heading might be called for in steering, and a plot of the trend lets them think ahead to new sails or points of sail. But changes in true wind as such do not necessarily tell us what is going on with the weather map ground wind, because true wind is tied to STW, which in turn is dependent on CTW. A change in the ground wind speed might lead to a change in true wind direction, when in fact the ground wind did not change direction... or vice versa.
This possibility is enhanced when sailing in strong currents, which is common in the Pacific Northwest, and in other places like the Bermuda Races that have to deal with Gulf Stream eddies and meanders, with currents up to 4 kts.
We look at some numerical examples below, but first a quick look at how this distinction is implemented in the nav station. There are two ways to address this. Either the nav program accepts all the sensors independently (CTW, STW, COG, SOG) and then it computes the four results itself (TWS, TWD, GWD, GWD) or sophisticated wind instruments that include all these sensors, compute both values for display and graphing on their own multi-function displays, or they transmit TW and GW to the computer nav programs for them to display and analyze.
Expedition, Rose Point Coastal Explorer and ECS, qtVlm, Deckman and TimeZero/MaxSea are examples of navigation programs that do these computations based on individual inputs, although TimeZero displays only one type of true wind at a time—you decide at setup if the displayed "True wind" is going to be TW or GW as defined above. Also each of these programs will also display the pre computed results from instruments if delivered to them in a NMEA sentence, discussed below.
Two examples of wind instruments that compute, display, and export both true wind and ground wind are the B&G H5000 and the AirMar 220WX. The former uses the terms true wind and ground wind, but the latter uses a NMEA influenced misnomer called "theoretical wind." The AirMar theoretical wind output can be GW or TW or both, but to get TW you must send it a NMEA sentence (VHW) with knotmeter speed—that unit has a GPS and a heading sensor, but no knotmeter.
This wind data gets transmitted to and from the computer using the NMEA sentences discussed below.
AWA and AWS use VWR, and TWA and TWS use VWT. In both of these sentences, the wind angle (0 to 180) is followed by a L or R (left or right) for port or starboard winds. The sentences are simple and symmetric. It seems T stands for true and R for "relative," which is here meant to mean apparent.
These sentences are in wide use, but NMEA recommends a different sentence to use for both of them, namely MWV, which is a more complex sentence. When you have both AW and TW to transmit, you would have two MWV sentences, distinguished by an R or T following the wind angle. They say the T is for theoretical, but the only logical way to interpret what they write is to call that True, water based, as defined above.
The complexity comes in the way the wind angle is defined for both T and R. It is the (0 to 360) relative bearing of the wind direction. Thus a wind angle of 90 would be 90 R in the other sentences, and a wind angle of 270 would be 90 L. The wind angle 330 is 30 L, and so on.
GWD and GWS are given in MWD. Here the wind direction is just 0 to 360, "relative to North," and the speed is the wind speed "that blows across the earth's surface."
In principle, the wind data in the sentence MDA (Meteorological Composite) should in fact be GW ("wind speed and direction relative to the surface of the earth"), but this sentence is misused so often that NMEA discourages its use, and indeed this one is fading away.
__________
I want to add specific numerical examples to show the value of GW for weather analysis and forecasting, and specifically why recording TW alone could miss vital signs of weather changes... but this will take some time, and I want to post this much so I can get feedback from anyone interested in this topic. I also now have some nice Expedition log data thanks to racing navigator Andrew Haliburton, which I can show as well once we get it analyzed.
We do not need to discuss the value of the TW (water based true wind), because that is fundamental to sailing and well known.
For now, please let me know if there are comments on the above to date. I know there are sailors with strong feelings on this topic, so my goal here is to show how these two concepts fit onto the boat, and who specifically might use which.
I found it interesting to note that the racing program Adrena refers to and tabulates the wind in a grib forecast as GWS and GWD, which is of course true. But if you ask the meteorologist who coordinated the production of this grib forecast if that is ground wind, they would almost certainly say, "What is that? Do you mean true wind?"
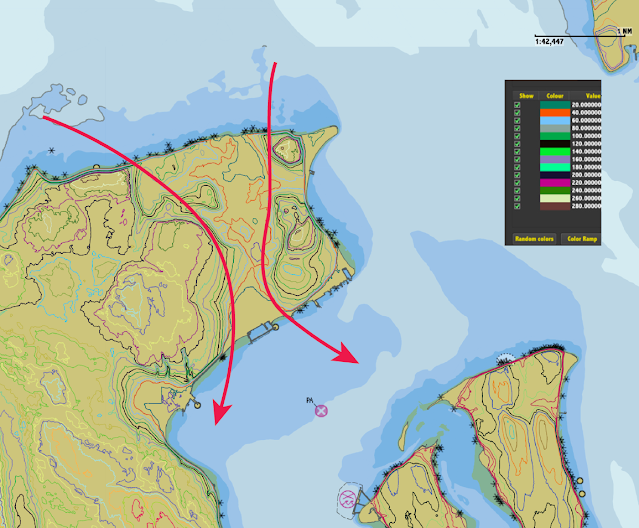
In the meantime, here is a quick look at this distinction using qtVlm simulator and live data from the Gulf Stream that I just now downloaded: GFS wind and RTOFS current.

Recall that after clicking to see the image you can right click again, open in new tab and then zoom in for more detail.
Below we add the Gulf Stream and this boat is sitting in about 3 kts at the moment.

Now we see that only the GW agrees with the grib winds and the wind directions differ by 4º and the wind speeds differ by 3 kts. So the effect is clear, but the real value comes in analyzing the trends, which can tell us much, even if the actual values do not differ too much, but this will take me a bit longer to put together.
Another thought to address is the uncertainty in the forecasts is something like ±2 kts on the wind speed and ±10º or maybe a bit less on the direction. These uncertainties are about the level of differences in the two wind definitions in some cases—but that fact should not distract us when it comes to an effort to do the best we can in the analysis. One definition of the wind is right for this comparison and the other is not, and even though the forecasts have a notable uncertainty, that does not mean they will be wrong by that much. In short, it is not productive to ignore this distinction in wind definitions because the uncertainties in the forecast data and our own measurements might be comparable. By ignoring the distinction we increase our measurement uncertainty in a way that could be avoided.
__________
Here is an earlier article that includes the formulas we use to compute the winds, plus much discussion of the concepts in the comments. True Wind From Apparent Wind — Revisited.