We use dip short primarily for practicing with cel nav sights on land using a shoreline of a lake or bay that happens to be too close to use, so the shoreline is blocking out the true sea horizon. We can determine if a shore is far enough away to ignore this issue using the square root of our height of eye (HE) above the water surface. The minimum distance for a good sea horizon is D in nmi must be greater than the Sqrt (HE in feet). Standing on a dock with HE = 16 ft, if the shoreline I use for a horizon is 4 nmi or more away, then I can use that shoreline as if an open ocean horizon. Nothing special would be required for cel nav sight reductions.
Indeed, for D > Sqrt (HE) we are not actually seeing the shoreline; the curvature of the earth is blocking it and we are seeing a true horizon.
Beyond its use in sextant practice on land, dip short remains a practical tool for the navigator's bag of tricks. It was more important to large vessels that relied on cel nav than it is to smaller ones because with a low HE you have to be right up on the land to have the shoreline blocked, i.e., at 9 ft HE you can be within 3 nmi of the beach and still get good sights using the shoreline. On a taller ship this would be more like 5 or 6 miles.
In any event, if we have not had any good navigation for quite a while and come up on land during the night that we cannot identify, changes are we would hang out till day break to carry on. And if the sun came up over the land as in the pic below, we would want a sun sight to start figuring out where we are, but if the shore is too close, we have to solve for dip short.
But to do this, we need both HE and the distance to the shoreline (D) which we do not offhand know so far. We do not even know what land we are up against; no chart, no info. And that is the subject at hand: how to find our distance off in this case so we can use dip short.
Below shows the sun over the land. We are some distance off, standing at HE = 9ft and we guess we are closer than 3 nmi.


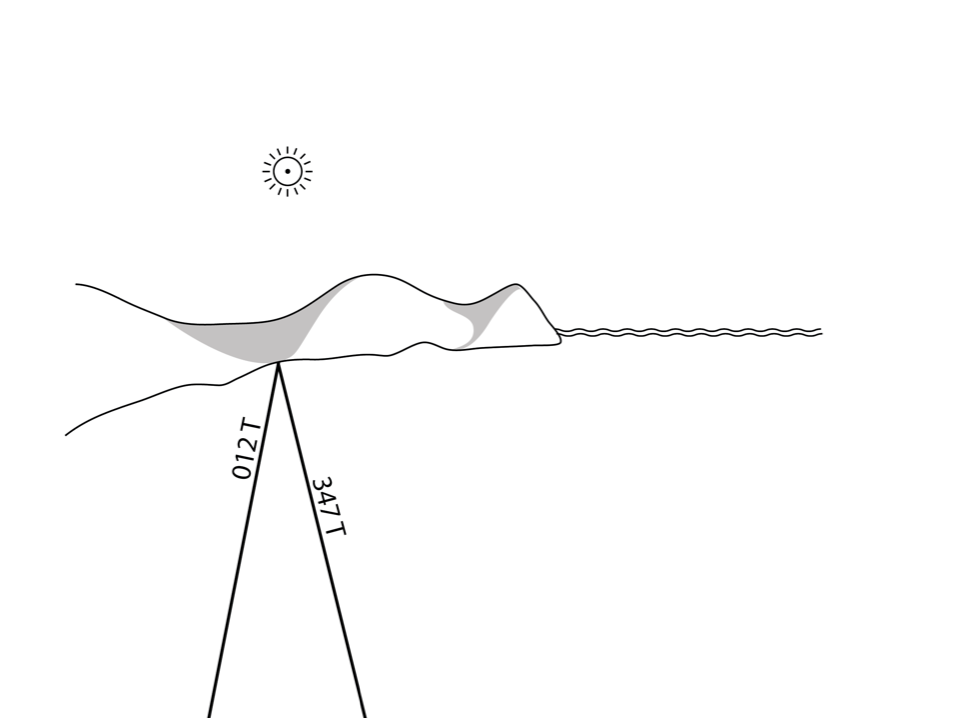

We cannot have been at point A, because 0.6 nmi toward 294 does not get us to the next bearing line. We also cannot have been at point B, because our run would have put us past our known LOP. You can set the dividers to 0.6 nmi and use parallel rulers to find the right place, i.e., point C, but there is an easier approach.

The systematic solution that does not require hunting around is just pick any point A, and plot out the 0.6 nmi in direction of your course, 294, and make a dot. Then use the parallel rulers to move the initial 347 LOP over to that point, as shown above with the dotted line. Where that line crosses the 012 LOP is your running fix. Now use your miles scale to figure the distance off the landmark, which is what we needed. We still have no idea where we are, but we do know we are 1.1 nmi off that landmark and that is what we need to find dip short.
The regular dip correction shown in the Nautical Almanac is computed from the formula shown below for dip. With our HE of 9 ft, this would be a correction of -2.9' to the sextant height. At any height above the water we are seeing over the true horizon, so our sextant heights are too big and we have to account for this with the dip correction.
When the land is too close, we do not see the proper horizon for our HE. The horizon is too close so our sextant height is even bigger than it would be for a true horizon, so we will have a bigger dip correction, the so called dip short. That is a given from the formula below, which is in our cel nav textbook and many other places.