Speed and heading are two fundamental parameters in marine navigation, but as instruments and navigation programs become more sophisticated, we can face challenges in keeping these basic parameters in order. I do not refer to speed over ground (SOG) or course over ground (COG), these one-time elusive parameters are now the simplest to understand and to measure. They come from the GPS instrumentation; meaning their abbreviations and place in NMEA sentences are all very clear.
The challenge comes with boat speed through the water (knotmeter speed) and more often with the heading of the boat, being the angle between the centerline and either true north or magnetic north. These are sensor measurements that get transmitted to the nav program via NMEA sentences or N2k parameters.
The issue is that these parameters can be transmitted in more than one NMEA sentence, and these days it is not uncommon to have more than one heading sensor, and if these might be from different companies they might be telling you the heading in two different sentences. At that point we need to learn if the sensor software will let us choose which sentence to use, some do, some don't, or if our navigation program lets us filter out the ones we do not want—again, some do, some don't.
That is in large part the issue. Seems simple enough, but I know from recent experience this can eat up hours of time sorting out, so these notes are an attempt to alleviate that issue—and to document the findings we needed to resolve a related case.
Heading is the more common issue, so we look at that first. Here are the primary NMEA sentences that involve the heading of the boat, keeping in mind that electronics can create proprietary sentences, plus some electronics still export old sentences that have been deprecated—a NMEA term meaning do not use these anymore.


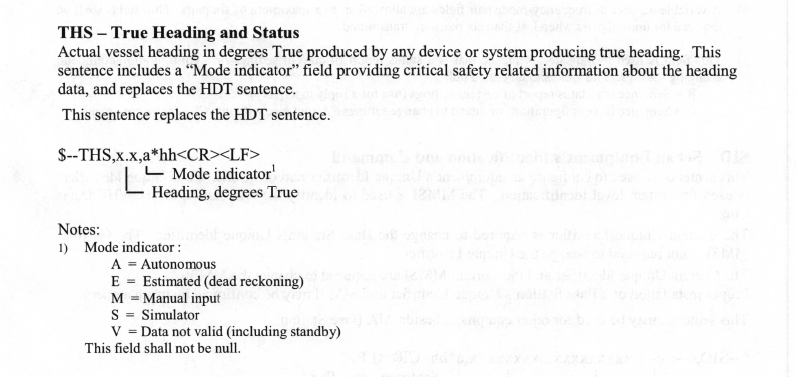
Old equipment still using HDT use it in the form:
$--HDT,x.x,T*hh
Likewise you will also sometimes see:
$--HDM,x.x,M*hh. Both of these are old.
When using N2k (See Introduction to NMEA 2000—with a Review of NMEA 0183) there will be a conversion between PGN parameters and NMEA sentences. The correlation is shown below as presented in an Actisense gateway manual. See a similar list at RosePoint Navigation.


Note that the vessel heading (PGN 127250) can be exported to several NMEA sentences, which can potentially cause a conflict if other devices are also exporting the heading.
Abbreviations in ECS
Now taking a look at how these parameters are presented in various ECS, with a note that electronic charting system (ECS) is the official name of any navigation program that is not a type-approved ECDIS. In short, any "nav program," "charting software," or console "chart plotter" interface to a GPS sensor. We cover this distinction in our text Introduction to Electronic Chart Navigation.

It is not easy to find official sources for recommended abbreviations. Bowditch, for example, 2021 edition, page 437, Glossary of Abbreviations, gives S for speed and Hdg for heading. STW and CTW are not listed. S is also used for set, south, slow, sand, and the sea-air temperature difference correction!
A more useful source is the International Electrotechnical Commission (IEC) Glossary online where we find these definitions:

According to this important source, CTW and STW are well recognized abbreviations. Also it appears that CTW and "heading" could be used interchangeably. In principle we have a heading at the dock but not a CTW. ECS that use both (HDG and CTW), such as qtVlm and Expedition (identifies CTW as "course"), are more general. Some consider that CTW should be HDG + leeway, but this is just the sort of thing that has to be sorted out within the ECS in use.
Looking at the speed parameter, that can be made complex as well. Generally we think of STW as the speed in the direction we are pointed, our HDG, but if we have much leeway it will reduce the proper knotmeter reading, as shown below and discussed in Leeway effect of knotmeter speed.





— heading to ± 1º— accurate, stable heading leads to clean radar trails— very high GPS accuracy of ± 5m— SOG to ± 0.02 kt with 5 satellites— VBW speeds to ± 0.02 kts— rate of turn (ROT) output for AIS broadcasts— barometer ± 1mb with calibration offset option
— air temp ± 2ºC
— heel output for leeway computations and anemometer corrections— data smoothing and offsets available on all outputs— DR mode for lost GPS signals
No comments:
Post a Comment