The procedures presented here apply to any application of adding an image to a PDF, but we are focused on a specific marine navigation application.
The NOAA Custom Charts (NCC) app sometimes has difficulty placing compass roses in best locations.in which case you can just shut off the compass rose option when creating the NCC and then make one with the free app below. That will generate a NOAA-style compass rose as a PNG file with a transparent background that you can then paste onto the PDF NCC where you choose, and resize as desired.See Instructions on adding an image to a PDF.
Preliminary Notes
The NCC PDF includes the chart itself and several pages of chart notes. You can print all pages of the NCC on a regular printer paper and that gives you a compressed view of the chart, along with the chart notes. At this stage we can then concentrate just on page 1 of the NCC which is the chart itself.
To remove all pages of the NCC except the chart (on page 1):
1) Open the chart in Google Chrome
2) Choose Print, top right icon
3) Under Destination choose Save as PDF
4) Under which pages choose Custom and enter 1 in the field below it
5) Print, with the option to rename.
Owners of Adobe Acrobat Pro, with Mac or PC. This is the easiest solution.
1) Open the PDF in Acrobat
2) Choose Tools tab and then Edit PDF
3) Choose Add Image, navigate to the rose PNG saved, press Open.
4) Resize with a corner control; drag to desired location
5) Click Close top right of the display.Done
Mac computers use Preview App. (Easy… but involves an unusual trick!)
1) Open the PDF in one Preview window and open the rose PNG in another Preview window.Do this by right clicking the files in the Finder and choosing Open with Preview.
2) In the rose window, click the screen to activate it, then do
cmd+A to select all, then
cmd+C to copy all, then
cmd+V to paste what you copied right back on top of the image,
then click the center of the image to activate it then
cmd+C to copy
3) go to the NCC window and click to activate it, then do cmd+V to paste the image onto the PDF
4) size as desired and more to desired position, then cmd+S to save and you are done.
PC computers install free graphics program called Inkscape and use it.
1) Open Inkscape, then menu File/Open and open the NCC PDF
2) accept all defaults they offer and choose OK
3) Position the window so you can see the full PDF
4) Do ctrl+A to select All
5) Right click image and choose Lock selected objects
6) Menu Layer / Layers to open the layers window on the right.
7) Lock the top layer shown which is your NCC chart by clicking lock icon
8) Click + to add a layer; call it “compass rose”; Position “above current”, be sure it stays highlighted
9) Menu File/Open and open the rose PNG
10) Click the rose to activate it, do ctrl+A to select all, then ctrl+C to copy all.
11) Right click the screen and paste the rose
12) Position and size it as desired, then menu Save as, choose PDF format with name of choice, and done.
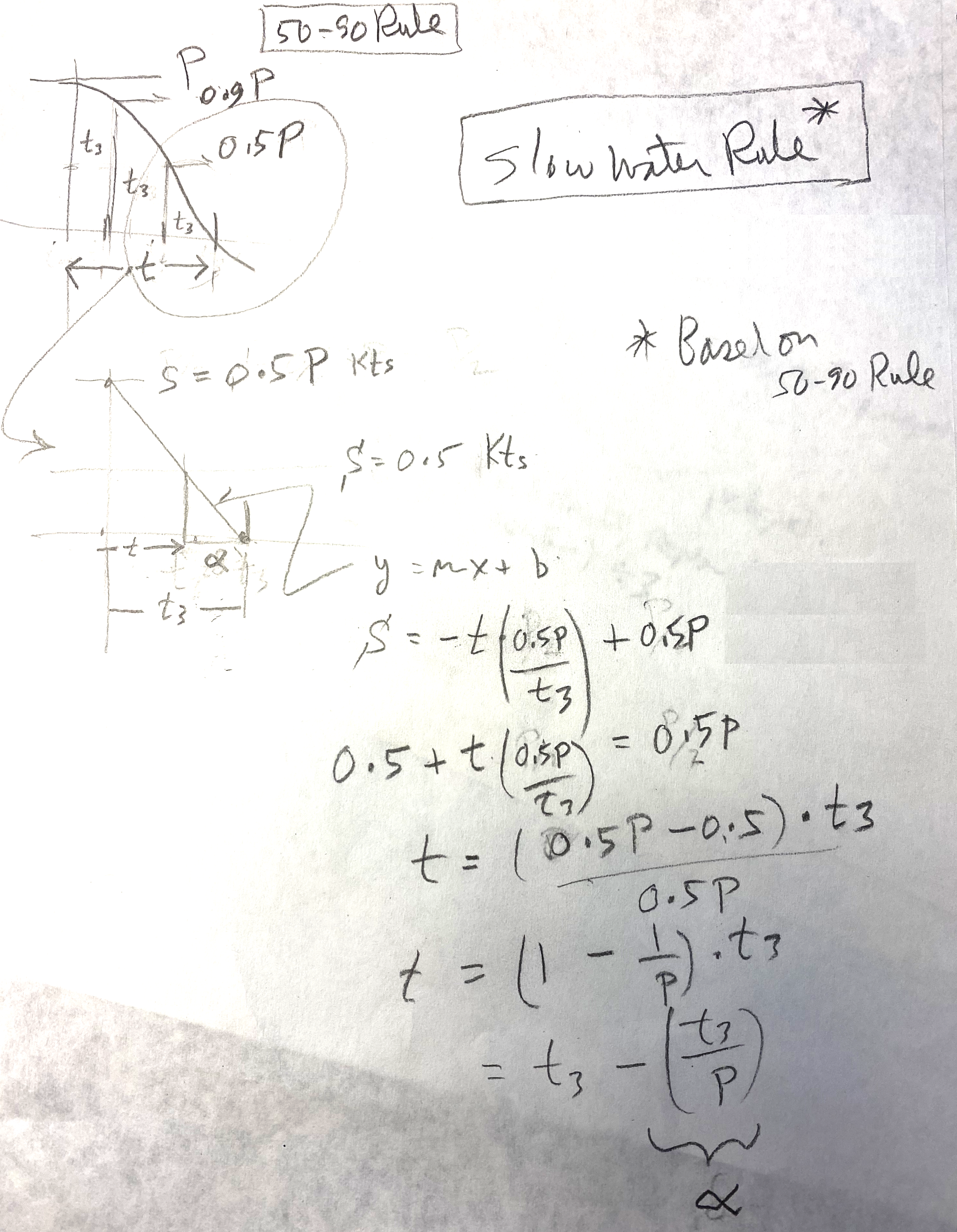
Our 50-90 Rule for estimating tidal current speeds between tabulated peak currents and slacks has been adopted by the US Power Squadrons, who have developed a form for its use. What is less well known is our Slow Water Rule for estimating the time the tidal current will remain below 0.5 kts at each slack time. This rule is actually based on the 50-90 Rule as is shown below.
The Slow Water Rule states that the current stays less than 0.5 kts on either side of slack for a time (in minutes) equal to 60 minutes divided by the peak current speed in knots. This period is usually different on each side of the slack for mixed semidiurnal tides. That very simple form assumes the period from peak to slack is equal to the global semidiurnal average of 3 hr, but there are many cases where this varies from just 2 to over 5. Thus to make the Rule more accurate, replace the 60 min with one third of the actual time interval between peak and slack.
A main purpose of this post is to document how this Slow Water Rule comes from the 50-90 Rule, and that is shown in the hand drawn image below.
In this sketch, t3 is one third of the slack to peak times. Alpha is the slow water estimate we propose.
Granted, we are looking backwards with these efforts to do navigation in the head, on the wing. Traditional paper charts are being completely replaced with electronic charts (ENC) and with that more and more mariners will be using some form of electronic chart system (ECS) for their navigation...more commonly called just a "navigation app" or "echart app." Popular free ones are OpenCPN and qtVlm, both of which include excellent tide and currents functions that display and plot the tides or currents—which pretty much answer any question we have about this crucial data. Commercial nav programs also, of course, include excellent tide and current presentations that answer tide and current questions with a couple mouse clicks.
In short, traditional methods in all aspects of navigation are likely to be set aside as we move more into more electronic charting. We complained about this when GPS came on the scene, and there will likely be more complaining as the charts get transformed from traditional preprinted fixed editions to the new user-designed and user-printed NOAA Custom Charts (NCC). It will take a while for the NCC to settle in, but I am confident that in the end they will be in fact superior to the traditional charts they are replacing.
This article was intended to point out a limitation in the HRRR data provided by Saildocs and a couple other sources in that the wind directions on the two US coasts could be off by some degrees, which we could easily account for. We do not know exactly when this was corrected but looking today we see that this correction has been made, so the HRRR data from Saildocs is now identical to what we would get from a direct NOAA download. This is good news for many sailors as Saildocs remains the most convenient free source of weather data and we all remain very grateful to them.
__________________
HRRR (high resolution rapid refresh) is one of the premier regional wind models from NOAA. The native data are distributed through NOMADS in a grib2 format that uses a Lambert projection, which is very similar to a great circle projection. OpenCPN at present cannot read and display that format, as is the case with many echart programs and grib viewers. With that limitation in mind, Saildocs has done a service for mariners by converting the Lambert projection into a rectangular Lat-Lon projection that can be read in OpenCPN and other grib viewers.
The attached video shows the process of obtaining the HRRR grib from Saildocs, which is straight-forward, with a couple precautions to guard against large files. We propose a hybrid solution that lets OpenCPN create the email request that we then tweak a bit before sending to Saildocs.
There are two formats for the HRRR data. The standard model forecasts are computed every hour and there is a forecast made for each hour going forward, out to 18 hr. There is just over a 1.5-hr latency, meaning that a forecast computed at say 15z (z=UTC) will have the first of the 18 hourly forecasts valid at 15z, but we will not be able to download this forecast until about 1635z.
The second format is same as above, but at the synoptic times of 00, 06, 12, and 18z the forecast extends out to 48 hr. Saildocs calls the standard version HRRR and the extended version is HRRRX. The latency for this one is just over 2h (0205). Thus the 48h forecast ran at 12z will be available at about 1405.
The main point I want to stress here, however, is the native HRRR CONUS (continental US) forecasts obtained from NOMADS present the wind direction relative to the orientation of the grid, which in the Lambert projection does not line up with the North-South meridians, and this correction is not accounted for in the HRRR data from Saildocs. An overview of the corrections is shown below.
The HRRR CONUS coverage map is from luckgrib.com/models. I have overlaid the approximate orientations of the grids.
Saildocs HRRR wind directions in the East CONUS are too small and we must add these corrections depending on location. In Cape Cod, for example, the correction is about +15º, so when you read a wind direction of 100, the actual HRRR forecasted wind is 115. In the coastal waters of the West CONUS, we subtract these values to get the actual HRRR wind directions. In San Francisco Bay, for example, the correction is about -15º so an HRRR wind from Saildocs of 100, would mean the intended HRRR forecast is for 085.
These shifts of roughy ± 15º along the coasts are not really so significant for a static forecast, keeping in mind that the the model data themselves and all the buoys we read the wind from are only accurate to ± 10º or so. But this offset is something to be aware of when doing optimum weather routing computations as this shift can have a significant effect on those results.
The nominal average of about 14º to 16º right along the coast is correct for the actual grid orientation but the projection conversion process introduces some spread to this. The values pictured above should be considered ±3º or so.
We focus on OpenCPN in the video demo below, but this same correction would be called for when viewing the Saildocs HRRR gribs in any viewer.
I should stress that the programs Expedition and LuckGrib are two that provide their own access to the native HRRR data and their presentations are correct as displayed.
For routing analysis and computations we have several global models we can choose from, as well as several regional models. An important step is choosing what might be the best forecast. Elsewhere we have an in-depth article and video on Evaluating a Weather Forecast, but our first step here is just comparing what the different models forecast.
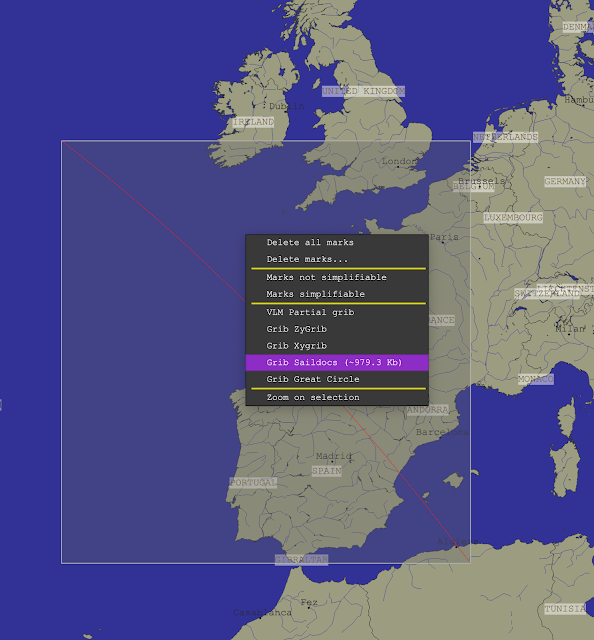
Step 1. Download the data. We use three global models available from Saildocs, accessible from within qtVlm, but in practice you may choose other products or sources.
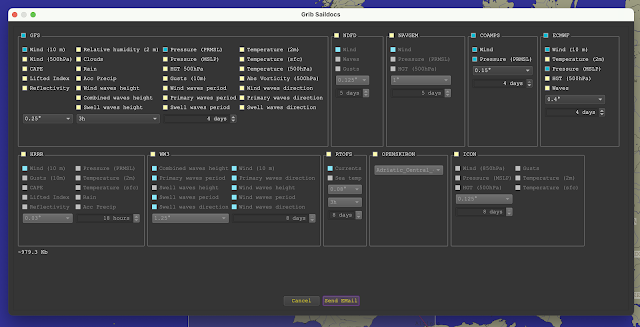
Then select the models (blue means on, yellow means off, for all of qtVlm):
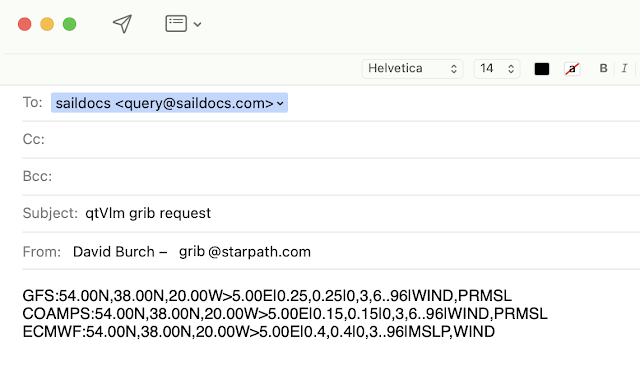
Here we choose wind and pressure from GFS, COAMPS, and ECMWF. We are after wind comparisons, but the pressure can help us understand what is taking place. Pressing send email creates the request we send to saildocs and they send back by return mail the 3 model forecasts in grib format. We asked for the best resolution that each model offers and restrict the comparison to the time interval of the shortest one, namely COAMPS at 4 days. In each case we ask for a forecast every 3 hr.
The generated email then looks like this shown below. We could create it manually as we explain in Modern Marine Weather, but the auto generate function is a convenient tool.
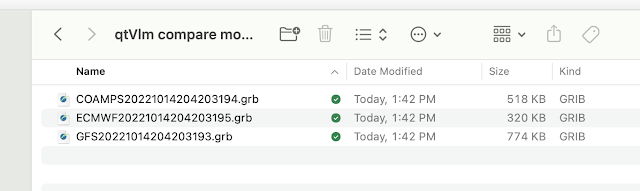
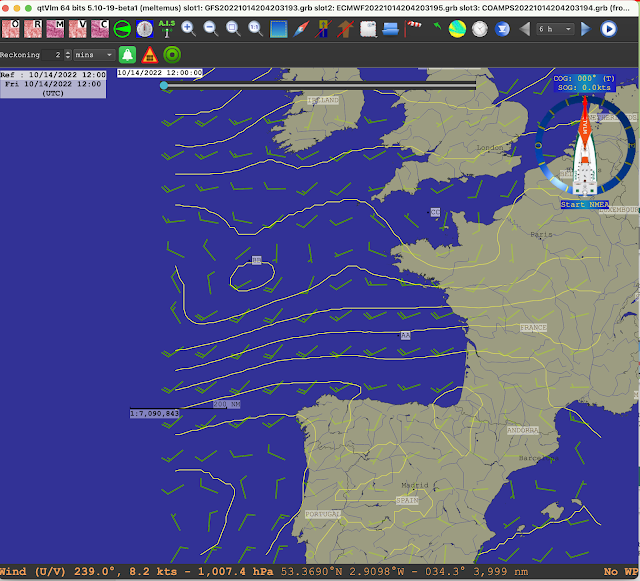
We get back three emails with the grib files as attachments, which we then drag into a folder to be used by qtVlm, which looks like this:
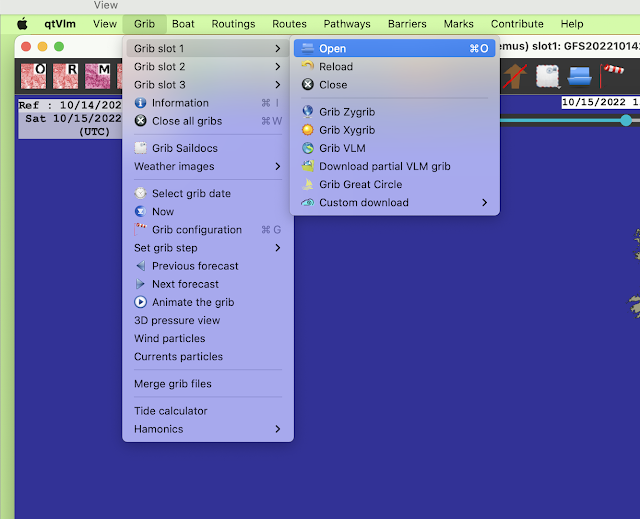
Now we load each of these into qtVlm, starting with slot 1. The order is up to you.
At this stage you navigate to the file in the folder above and say OK. Then do the same with slot 2 and slot 3 for the other two forecasts.
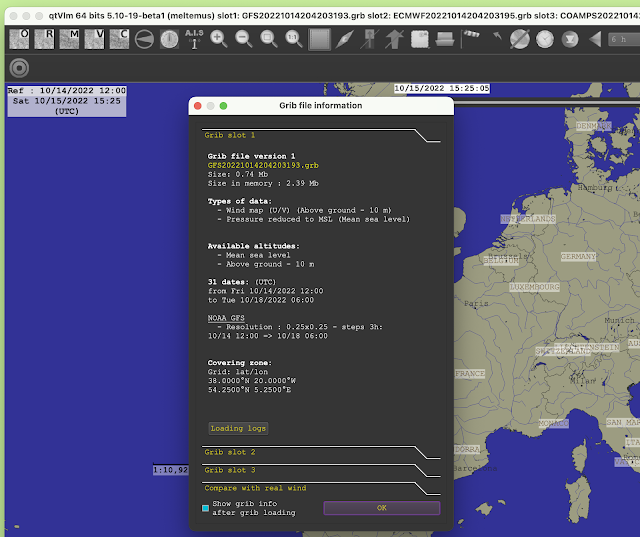
Once all are loaded, they will be listed in the title bar and you can use menu Grib/Grib Information to inspect the contents of each if desired. The wind barbs themselves might not being showing if we do not yet have them turned on.
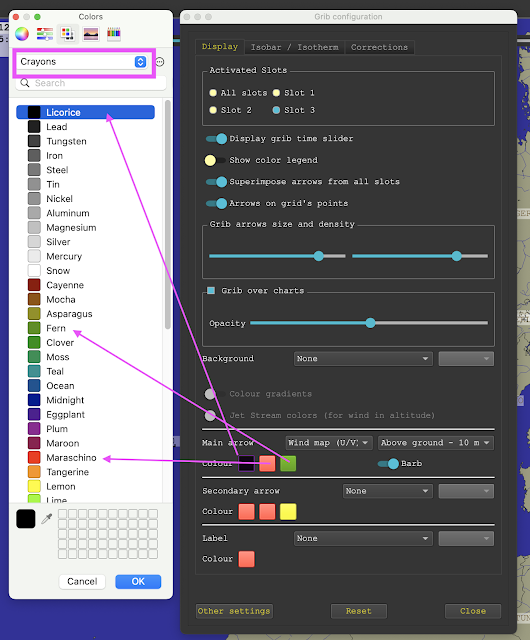
Next we want to use menu Grib/Grib configuration (windsock toolbar) to set up the wind display to enhance the comparison. Use these settings:
The colors have to be done one at a time. The three arrow colors are slots 1, 2, and 3. Set one; close it; set the next. The logic of these color choices will be clear shortly.... or maybe not!
Next set the isobar display using the isobar/isotherm tab.
The bottom slider controls the thickness. Midway is good.
Now we can turn on the wind and see the first comparison:
Black, red, and green are 1, 2, and 3, which can be checked in the title bar. We see good agreement in some places and poor agreement in others. This is the first forecast (effectively a surface analysis) which we see from the slider being far left. Change times with the slider or use the clock icon to digitally set to a specific time. This way you can scan through to see how the agreement stands, looking at a large area, or zoom in to look at a more local area.
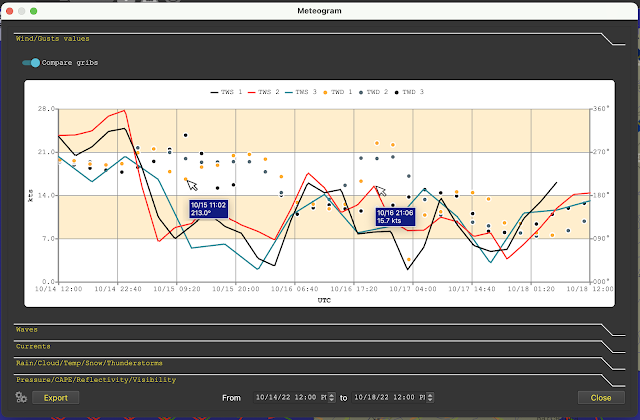
For time comparisons and a more digital comparison, right click where you want to see a meteogram, and then choose "Compare models," as shown below.
The meteograms always start at the location of the on screen display, indicated by the grib time or slider location.
Also we see now the intended motivation of the color selections. These meteograms have fixed colors so we have just forced wind barb colors, which we can change, to match the graph colors that we cannot change. Else we have 6 colors to sort out, or worse, the same colors meaning different things.
This is the forecasts for Point AA. A cursor over the point brings up the values, faked here in that only one at a time can show. We see mixed agreement at this point over time.
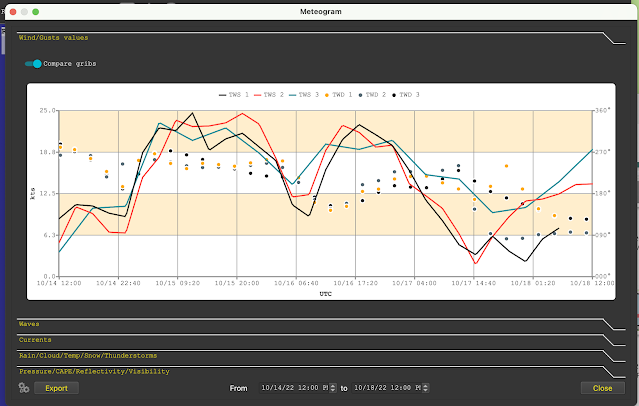
This is the forecasts for Point BB, which is pretty good agreement for the first two days.
This is the forecasts for Point CC. We see the models agree and disagree over different areas and times, but this is just a demo of how this works. Generally we would be focused on a more localized area.
Referring back to the wind barbs view above we see some areas agreeing and others not. This would generally lead us to look at the isobars. But there are some nuances to getting the most out of this, in that for now we cannot directly compare isobars from different models. We have to look at each individually, and we will likely find one model more useful than others. Here are the three models with their isobars for the surface analyses at 12z (first forecast).
Slot 1, black, is the GFS.
Slot 2, red, is the ECMWF.
Slot 3, green, is the COAMPS. This is a US Navy regional model, which accounts for why it does not cover the full extent of the other two, which are global models. The transient weak Low at point BB does not last long.
In you own boat at sea or along the coast, you will likely have an have an accurate barometer in your pocket, so you have compelling information about which of these models might be closer to the truth.
qtVlm also offers a very convenient way to download and plot all the buoy and ship reports around you which is more data to add to your own wind and pressure measurements to help pin down the best forecast.
Below is a video illustration (11:19) of the above:
These notes are intended as background for several videos illustrating the purchase and installation of S-63 charts.
• We are spoiled in the US. Our ENC charts are S-57 format, unencrypted and updated weekly, but we are not forced to update them if we do not want to. They run on any compatible device, in any compatible electronic charting system (ECS), and they are free to all users.
• To my knowledge, New Zealand is the only other nation to offer their official ENC free to the mariners (discussed below).
• Inland ENC (IENC), on the other hand, are free from every nation. These cover rivers and some limited coastal waters around the estuaries. US IENC cover only the "Western Rivers," as defined in the Navigation Rules. These charts have their own standards, similar to ENC, but not the same.
•In contrast, almost all international ENC are encrypted in the S-63 format, and must be purchased. They are restricted to a specific navigation program (ECS or ECDIS), running on a specific computer or dedicated hardware, and they must be updated (repurchased) on a fixed scale of 3 mo, 6 mo, or 12 mo.
•Most places where we buy S-63 charts have some form of graphic index to select from, but we might want more detail about individual charts than they offer, thus we recommend finding charts from the IC-ENC version that you can get to from starpath.com/getcharts (item 22a). See video demo below.
How to learn what international charts are available (5:20)
•Expired charts can still be viewed, but updates are no longer available. A warning must show in the nav program when accessing expired charts; this is a requirement of the S-63 compatibility certification of the ECS, reflected in the existence of a file called IHO.pub located somewhere in your ECS folder structure.
•To accommodate the encryption and restrictions on S-63 charts, the purchase and installation of the charts are more complex than it is for use of S-57 charts.
•Fortunately, New Zealand offers all of their official ENC free to users in the S-63 format, so we can all practice both the "purchase" and installation of S-623 charts. We outline that process in our new book Introduction to Electronic Chart Navigation, 2nd Edition. The free sample of that book includes an outline of the process.
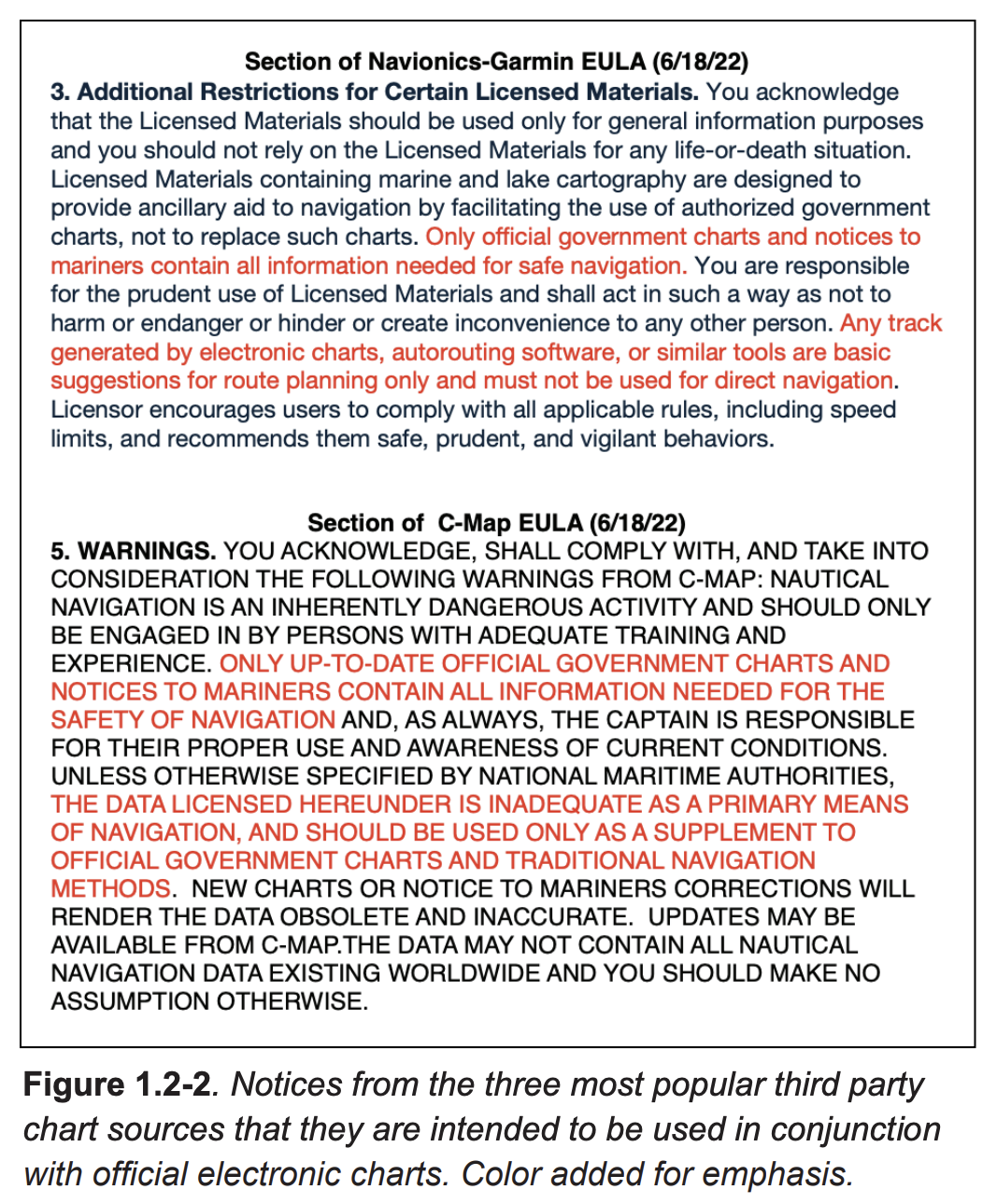
•Despite these extra steps required, prudent mariners sailing in foreign waters will likely want official copies of the most important charts. Others might be tempted to use only the convenient and relatively low cost third party products, but there are many documented examples of errors or inadequacies of these charts. Indeed, though rarely read, every time you open one of these apps you must accept the End User Agreements, samples of which are in our textbook.
•In short, prudent seamanship calls for use of official, updated charts, and indeed for just a few of them it is not that expensive: roughly 10 euros each for a 3 month subscription. The price of the charts are pretty much the same from any source.
•Obviously not sure how this evolves, but now, 9/17/22, is a good time to buy them. The euro is on parr with the dollar (roughly 23% less than last year) and most of these are sold in euros.
•Can likely get by with the 3 month versions—keeping in mind we are used to paper charts that were updated sometimes only on a year or two basis, since we can check the Local Notices to Mariners or Light List. The Light Lists now are typically updated online weekly.
•What is needed? The two main documents needed that are unique to your installation have names: The User permit, which is a 28 character number and a permit.txt file, which lists key numbers that relate your installation to the chart set supplied to the source.
•The user permit comes from your ECS (navigation software) supplier. For commercial programs that you bought, this permit is usually free. It is either already in the program somewhere, or you write to where you bought the program and ask for it. The user permit will apply to just your copy of the program running in a specific computer. If you change computers, you may need to ask for a new user permit.
•When using free ECS such as OpenCPN or qtVlm, there is an extra step required because these ECS can be loaded into any computer. This is resolved by requiring a onetime modest purchase for a plugin (10 to 20 euros) that configures the program to handle S-63 charts. In that process you run a function that creates a fingerprint file or number that identifies your computer and you submit that with the plugin purchase to get a key that opens up your nav program to handling S-63 charts. Both of these programs listed allow for the plugin to be used on 3 computers.
•More on shared usage: the S-63 charts are tied to the User Permit used when the charts were purchased. So the limitation on their display depends on the rules established by the navigation software. As noted, qtVlm and OpenCPN each allow a User Permit to be used on three separate installations. Commercial nav software generally associate the User Permit with the software instance. Some have rules that allow only one instance of the program, others allow for two simultaneous instances—a main computer and a backup. Most allow for unregistering the program on one device and moving it to another, in which case the User Permit would go with it.
•Most ECS offer a set of instructions for the installation of S-63 charts, usually with a sequence of links that should put all the components in the right place. The final folder structure of the charts is crucial. If you find that the packaged instructions do not work as expected, then create the file structure manually as we explain in our textbook, and then copy that folder to the charts folder or S63 folder in your ECS folder structure and link to that one to access the charts. This should also facilitate the updating of the charts as they become available.
• Updating S63 ENC can be tricky, because update files (ending .003, .004, etc) refer to a specific base set (.000). With good internet connections, the easiest route is just download the latest base set and latest update set and install them, as if starting from scratch.
•Again, the free S-63 charts from NZ is an excellent way to practice with obtaining S-63 charts and the associated files needed. The permit.txt file is the crucial one, but there are a couple others that are useful as well. To use the system, you need to first set up a free account using a valid email address. It is safe and non-invasive.
Download free NZ ENC in S-63 format (8:58)
•We illustrate an actual purchase using ChartWorld online. There are numerous places to purchase these, including storefront and online companies, but ChartWorld (in Germany) has an easy interface and offers all formats of charts globally, not just the S-63. They are also part of SevenCs, which is a world leader in ENC production and display. To use the system, you need to first set up a free account using a valid email address. It is safe and non-invasive.
Purchase and download S-63 charts from ChartWorld (12:15)
•To download the charts from ChartWorld: you will receive a link from them like ftp://www.chartworld.com/DC12345, where the last bit is your installation ID, unique to a User Permit. To access this in Win10 or Win11, open File Explorer and paste this in the address bar. You can then drag them to a folder of choice. All charts you buy now or later with that User Permit will be located there.
•Below are a few video illustrations of installing S-63 charts.
Expedition ---------------------------
Loading free S-63 Charts from NZ into Expedition (9:56)
Loading S-63 charts from ChartWorld into Expedition (10:16)
qtVlm ---------------------------
Loading S-63 charts into qtVlm (19:52), both free NZ charts and two AU charts from ChartWorld
Summary of the qtVlm process.
— read this article!
— prepare the program
— buy a user permit (15 euros)
— send user permit and hardware ID to qtvlm to get activation key
— check that all is ok
— get the charts and move then to the right folder
— practice with free NZ charts
— then use purchased charts as from ChartWorld
— assign the folder to the charts
— this is done from the S63 tab, not the main vector chart tab
OpenCPN ---------------------------
Loading S-63 charts into OpenCPN (12:22).
Summary of the OpenCPN process.
— read this article!
— prepare the program
— update plugins list and install the S-63 plugin
— purchase user permit from o-charts.org (12.5 euros)
— create hardware fingerprint, use it at o-charts.org to get an install permit
— buy the charts / unzip the folders / move them to your charts folder
— setup / charts / s63 charts / keys-permits / import cell permit assign user permit and install permit
This should not be a surprise. NOAA told us they were Sunsetting Traditional Paper Charts back in 2019 and that they would all be gone by the end of 2024. After these charts are gone, we will rely on electronic navigational charts (ENC) and the new NOAA Custom Charts (NCC) that we design on our own using an online NOAA app and print on our own in a size and quality we choose.
This note is an alert that this is happening at an accelerated rate... plus we have a way now to know the status of our favorite charts. In item (1) of our starpath.com/getcharts resource, go to the paper chart index on the left and you will see something like shown below for the San Juan Islands area.
Notice a few things new. Several of the charts are now gray and their traditional names have been changed to be preceded by the letters "LE." This means "last edition." I have clicked one of them (it turns orange) to show its details on the right. Take notice of the text in red. This chart is no longer updated and will be removed on Oct 5, 2022—2 month and 13 days from today. The same with all of the gray ones.
These are not random, obscure charts. These are the main working charts for the San Juan Islands, and it is not just this area. The extent of cancelation is even higher on the Gulf and East Coasts.
All gray charts west of Alabama are schedule for cancellation same time as the West Coast (Oct 5, 2022). Those on the East Gulf Coast and on the SE Atlantic are scheduled for Jan 4, 2023—that is 5 months 14 days from today.
The Central Atlantic has a lot charts leaving on Nov 16, 2022, which is just 3 months and 25 days.
When these traditional charts are gone, there are two NOAA Print on Demand outlets that have announced on their websites that they are set up to print the new ENC versions of these same charts. In other words, they are considering making their own NCC that are the exact aspects, scales and sizes so you could just ask for the chart number.
But it is not clear if that is the best solution. The NCC app gives the chart designer a lot of freedom on what is included and what exact area is covered and at what scale. I think it will be best for mariners to learn how to use the NCC app to make their own decisions on what paper charts they want to replace the old ones.
Luckily, there is an easy place to go to learn to use the NCC app, namely the Starpath online Course on Electronic Chart Navigation, which includes our unique textbook on the subject. We focus on the actual ENC usage, but do have an extended lesson on how to make the NCC along with practice exercises and individual support.
Needless to say, the goal of the US National Charting Plan is not to navigate on these NCC, but rather to navigate on the ENC, which is what we teach. But NOAA knows that many mariners, if not most, do indeed want to have access to a paper chart at all times, just in case—and that is the main purpose of the NCC.
Beside NOAA doing away with the traditional paper charts in lieu of ENC and NCC made from them, the USCG is helping this transition along. They have just competed a call for comments on their proposed new ruling that commercial vessels must have on board a functional way (ECS or ECDIS) to use the official ENC. Third party charts that dominate the recreational echart world, do not count.
In short, we have arrived at the moment where we have gone from a time when the ENC were a legal alternative to paper charts to a time when ENC are the required means of navigation. We stand by to learn how this specific ruling evolves, and what all vessels will be covered, but it will indeed be enacted.
The side message to this note is this: knowing how to find these LE dates, if you want a copy of the last valid traditional paper chart, now is the time to order it. Right now you can still even get a PDF of it.
Magnet variation (magvar) is crucial to marine navigation. It is the difference between true north and the direction of north read from a compass card, which is shown on the compass rose on a chart as the difference between true north and magnetic north. We might like to navigate by all magnetic bearings since we drive the boat by the compass, but we cannot avoid dealing with true bearings at times. Tidal current directions are always given in true, as are wind directions from any official forecast or observation. Charted navigation ranges are given in true, as are the visible boundaries of sector lights. Any cel nav solution must be worked out in true bearings, and so on.
In short, we might avoid them whenever possible, but we have to deal with true bearings. But that is navigator talk. Normally you would communicate related results or desired courses to the helmsman in magnetic and you would expect all logbook entries to be in magnetic.
Working with magvar is just one more aspect of navigation that is improved with the use of ENC. Magvar is an ENC charted object, and we can cursor pick any place on the chart to see what the local value is at that point. ENC get the latest values (magvar drifts slowly with time) from the World Magnetic Model (WMM), which is updated every 5 years on the even 0s and 5s. The most recent is 2020; next update is 2025.
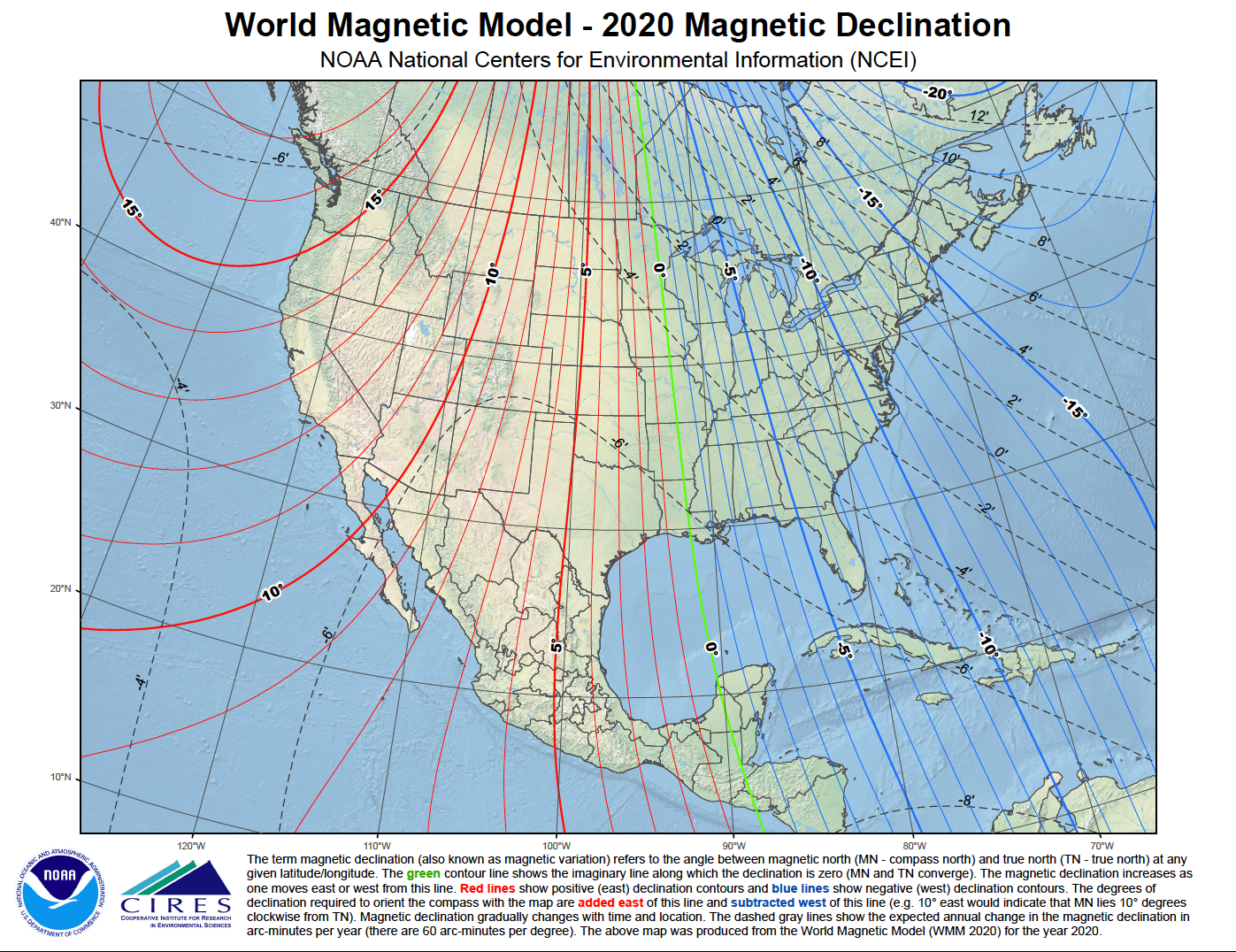
The image below shows how magvar varies over the country, along with its annual rate of change.
You can get a high res PDF copy including one for AK at the WMM link above.
The line separating E and W variation goes through New Orleans. The 2020 value at the NW corner of the US at Cape Flattery is about +16º (16º E) with an annual rate of change in minutes of about -6'/yr (6' W)—at present rate, every 10 years it will change by 1º; but the rate of change also changes with time. The spatial distribution of this change is on the edge of a col (saddle point) at this location, so it is not easy to read from this plot, but the actual values are well known at all locations (see WMM link). The reference year for these values is 2020.
Why ENC are so much better than paper charts on this topic is tied to the fact that traditional paper charts are being discontinued and all will be gone by the end of 2024. Consequently they are not being updated except in crucial matters—getting the magvar wrong by a degree or so once in a while is not really crucial in most circumstances.
Most current (July 2022) ENC have the 2021 values encoded in the charts (corrected from 2020 WMM), whereas the latest paper charts or the raster navigational charts (RNC) made from them could be very old. Two examples are below.
This latest edition of 18484, Neah Bay at Cape Flattery, WA, refers to magvar data from 2006. If we use that to predict the present value, which you would have to do if this is the only chart you have, even with it being the most current version, we would figure 2022 -2006 = 16 yr x 11'/yr = 176' = 2.93º. In 2006 it was 18º 15' = 18.25º, so the 2022 value would be 18.25 - 2.93 = 15.32º E, which would round to 15º E. Paper charts refer to the change as annual "increase" or "decrease," whereas with ENC we have to think though the algebraic use of + and – signs. E is +; W is –.
Checking the latest ENC for this area we get
Thus we see that the actual variation is 16º E - 1yr x 6'/yr, which is no notable change, leaving 16º E. In short, this latest paper chart has magvar wrong by just 1º even using this older data.
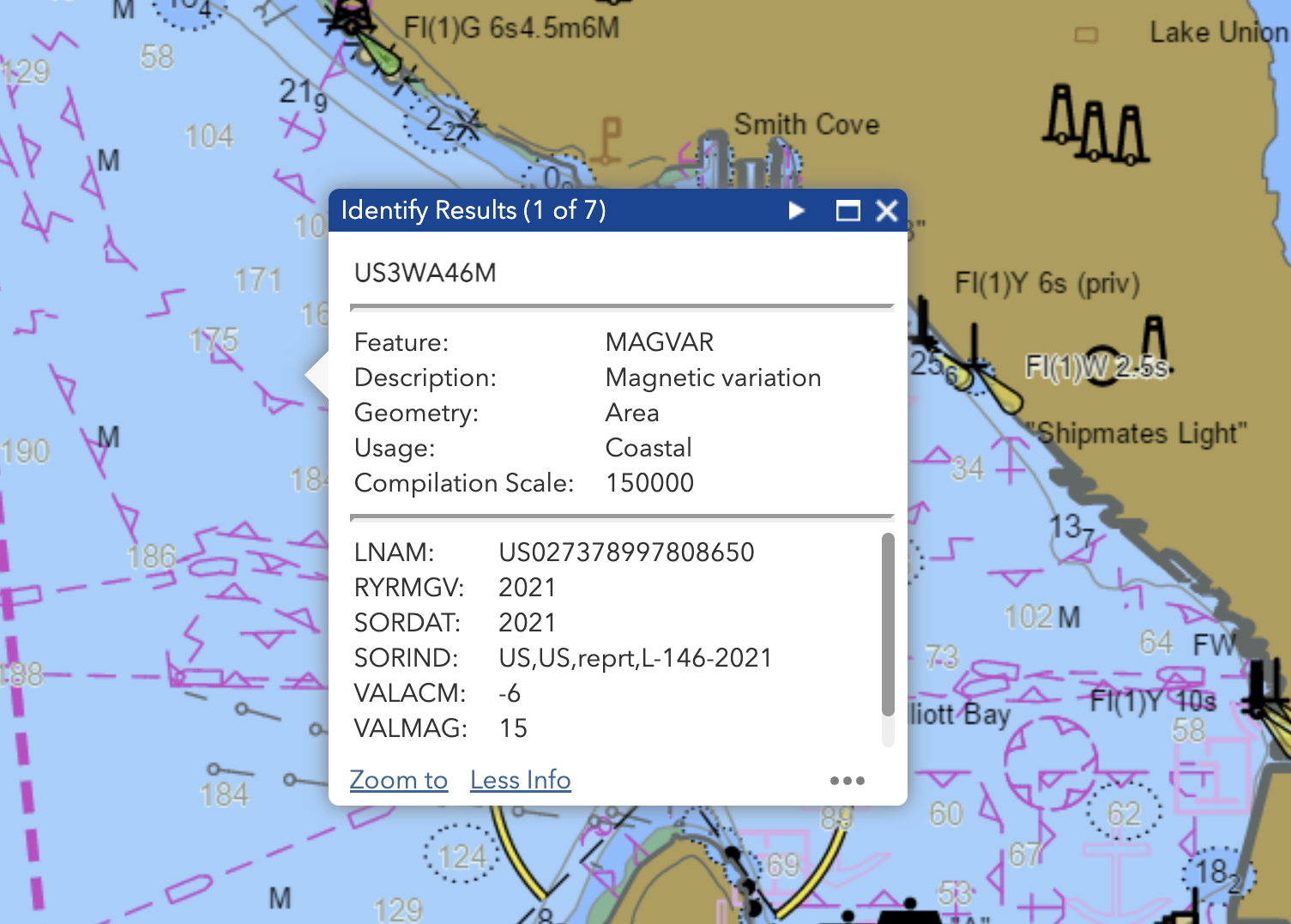
Neah Bay is remote, but Elliott Bay is not, being the access to Seattle. Below is the latest Elliot Bay Chart, 18449.
This latest printed chart value is from 2017, which means corrected from 2015 WMM. At 2022 we have 5 yr x 9'/yr = 45'=0.75º, which implies a current magvar of 15.25º E. We find the actual value from the latest ENC below.
An ENC pick report using the NOAA online ENC viewer. Here we are reminded that some ECS use only plain language names of objects and attributes, whereas others use only the so called acronyms (actually just abbreviations) for them... and some use both or offer the option, which is my preference.
The object is magnetic variation (MAGVAR); the attributes to this object are:
LNAM = "Long Name" a combination of several object ID parameters (not related to navigation; it is an object identifier, not an object attribute; rarely if ever shown in ECS)
RYRMGV = Reference year for magnetic variation
SORDAT = Source date, which, in this case, is date the data was posted
SORIND = Source indication, which is where the data comes from, an internal NOAA doc number.
VALACM = Value of annual change in magnetic (in arc minutes per year)
VALMAG = Value of magnetic variation (in whole degrees for an area magvar report.)
We always use RYRMGV for figuring the annual change, not the Source Date. In 2022, we have only a 6' change, so the actual variation at the moment is still 15º E, which is essentially what we got from the old data on the printed chart. This means that the rate of change changed at Neah Bay, but not so much here in Elliott Bay. It also shows why updating this magvar data is not a crucial paper chart update in most cases, and hence is not being done.
______
With those basics behind us, there are a couple more subtleties regarding magvar in ENC. Below is an expanded section from our book Introduction to Electronic Chart Navigation.
2.13 Magnetic variation
We can get spoiled using ECS navigation, because we just push buttons to switch back and forth between magnetic and true directions. In a dark sense, we don’t even need to know what the variation is. It is rather like not needing to know how to divide, since we have a calculator in our phone, or how to spell, when there is a spell checker in everything we write with. This is just a small part of the slippery slope of electronic navigation, but still one to be avoided.
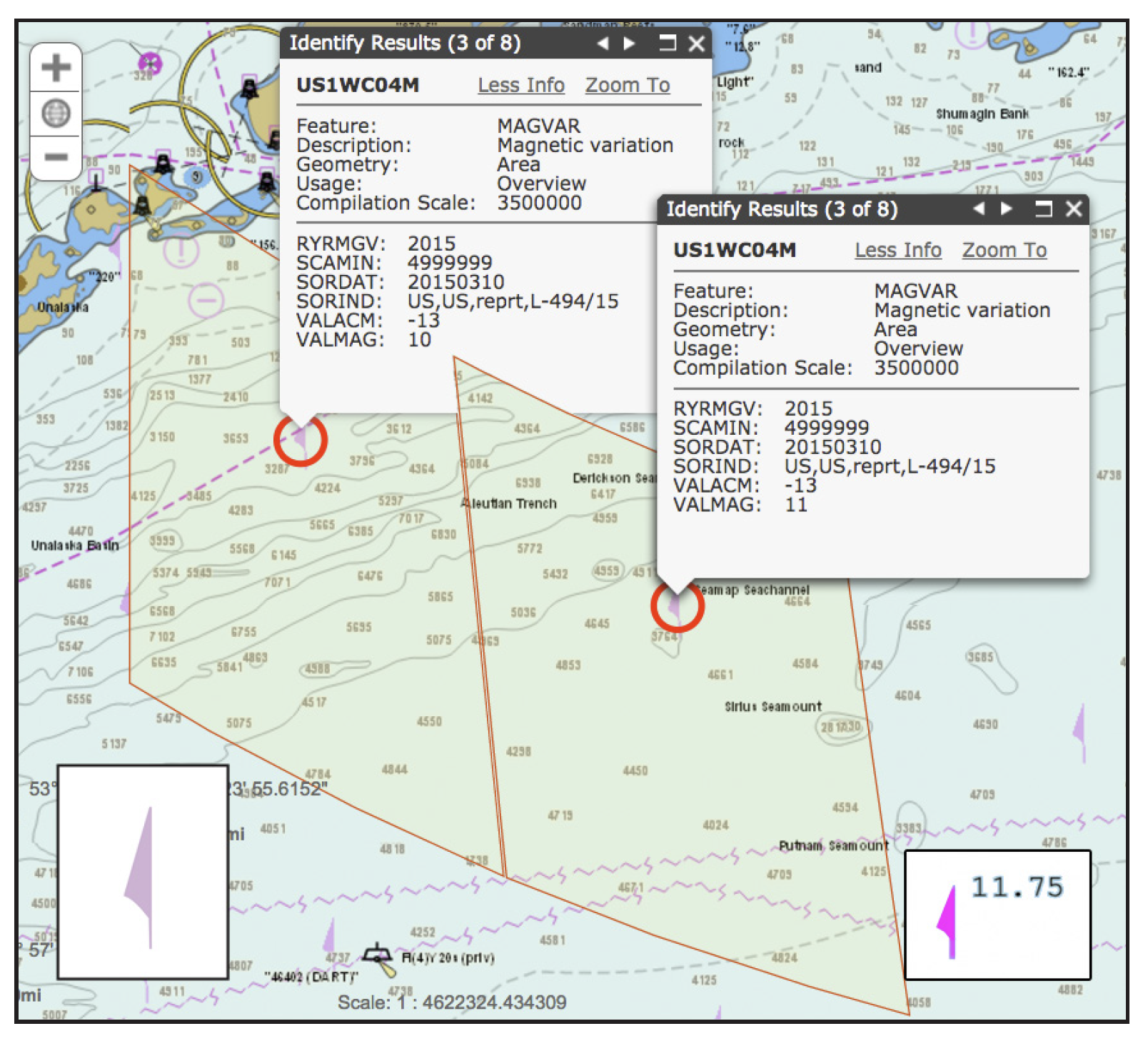
Magnetic variation (MAGVAR) is an S-57 object that can be encoded into an ENC as either an area or a point object. Area examples are shown in Figure 2.13-1. Some hydrographic offices include this data, but others (i.e., Canada) do not—inland ENC (Appendix 8) do not include MAGVAR in either the US or international versions. When MAGVAR is present as an area object we can find the value of the variation with a cursor pick at almost any place on the chart. The object has a scale minimum attribute (SCAMIN), so it might not be reported on all display scales. On NOAA charts, the SCAMIN value for MAGVAR seems to be the same as used for the soundings, so if you can see soundings you can see the variation symbol, and if not, you can’t—assuming the soundings display has not been turned off.
Figure 2.13-1. Another example of the value of the NOAA Online ENC viewer (Section 1.8), which has the instructive feature of outlining the boundaries of line and area objects when selected. Thus we can see the extents of MAGVAR area objects. We have made a composite of the reports to illustrate this pattern. In actual use, only one report at a time can be viewed. The MAGVAR areas can have other shapes, and the symbol changes locations as you view the area in different perspectives (called a “centered” symbol) The left-side inset shows the area object MAGVAR symbol; the right-side inset is a point MAGVAR object, showing just the value at that specific point. A hollow version of either symbol marks magnetic anomalies. The acronyms used in the pick report are explained in Figure 2.13-2. The scale minimum attribute of MAGVAR is typically the same as the soundings, so don’t expect the MAGVAR object to show up in a report if soundings are not showing. This image is from 2016.
There are symbols for magnetic variation seen periodically on the chart, although, as noted, we do not need to click it specifically to get variation. The symbols mark the identifying locations of the various MAGVAR area objects. These are the areas over which the variation is the same within one degree. These symbols are sparse in regions where the variation is not changing by one degree over the geographic span of the ENC cell. There is no correlation between the location of these MAGVAR symbols on an ENC and the placement of compass roses on the corresponding paper charts. On any ENC where we see a lot of these symbols it means the variation is changing by about 1º between the symbols.
A sample cursor pick report for a MAGVAR area object is shown in Figure 2.13-2. This is in principle the same data we get from a compass rose on a paper chart—if the paper charts were being kept up to date in this regard, but they are not. Often we do not need the value any more precisely, and since we are unlikely to be using old ENCs (as opposed to sometimes using old paper charts) it would be rare we needed to correct for the annual change in ENC values.
Figure 2.13-2.Cursor pick report for object Magnetic variation (MAGVAR) at a point. Point symbols include a text label showing the Value of the variation (VALMAG) to the hundredth of a degree at that specific point (15.83º E) and the Reference year (RYRMGV). The actual point report (top) includes values to the tenth of both variation (positive values are east) and its attribute Value of annual change in magnetic variation (VALACM), which is always in arc minutes, with an annual change toward the east being positive, and toward the west negative.
The bottom part of the report is for the area value of the variation at that location, which will always be rounded to the nearest whole degree that is the average value for the local area. You would get this same area report by cursor picking any place near this point on the chart.
Also shown is a MAGVAR area symbol, which is larger, in a fainter magenta, with no label. These symbols mark the area where the variation is constant to within 1º. These are elusive symbols (called “centered”), because they move on the chart as you change the display, staying as near the center of your screen as possible. They are identifying an area on the chart, not a point. Some ECS choose not to include these MAGVAR area symbols, as we can always get the variation with a cursor pick on the chart that reports the variation in that area. The only value of the symbol is to mark where the average variation is changing by 1º. More symbols (as seen farther north) indicate more change in the variation. Note that it can happen that an area average (15º in this case) is not the same as a point value in that area rounded to the nearest degree (15.8º in this case).
Also shown for comparison is the symbol for a point report of a magnetic variation anomaly. An area of anomaly symbol is the same as the area symbol shown, but in outline only (see Chapter 4, Section B).
The exception comes when doing a compass calibration, in which case we want this as accurate as possible.On paper charts, variation is marked East or West and the change is marked "Increasing" or "Decreasing," but on electronic navigational charts (ENC) only algebraic signs are used. East is + and West is –. Thus when the variation and the change have the same sign, the value is increasing with time; when they are opposite, the variation is decreasing. A value with no sign is +.
The correction is done in the normal manner. Using the value of annual change from Figure 2.13-2, in 2024, which is 3 years after the reference year, the correction would be 3 x -6’ = -18’ = -0.3º. The variation is 15º E, correcting to the west, so the corrected value is 15º - 0.3º = 14.7º E in 2024. We do not use the high precision point value for this because that is the value at just that one point, which is unlikely to be where we are at the time. If the correction and the variation are in the same direction, then it is getting bigger with time.
A main takeaway here is that even though the charts are updated weekly and the computer knows the time and date, we must still treat magnetic variation obtained from an ENC as if we were reading it from a paper chart. With that said, we note that this data is typically no more than a year old in ENC, so it is rare that we would need this correction.
Direct computation of magnetic variation
One reason some hydrographic offices might decide they do not need to encode the magnetic variation is because many ECS programs (and presumably some ECDIS as well) have incorporated special software that can compute the magnetic variation accurately for any location and date. One example of such a program is geomag.exe from the National Centers for Environmental Information (NCEI). This program can be downloaded for personal use, even if not used as part of an ECS. See References.
With this, or a similar program, running in the background, a user can interrogate any location on the chart to obtain the magnetic variation—even without an ENC loaded for that location. What information you get from that and how you execute the request depends on the specific ECS that has this feature. It could simply report the variation in plain language or present something similar to an ENC pick report. When using this supplemental ECS feature to find variation for a specific date and place, it would be good practice to check that it agrees with the value given in the ENC for the location.
These details of magnetic variation are important because ship captains are trained to make compass corrections accurate to a few tenths of a degree, which requires correspondingly accurate data. Accurate (point values) of the variation can be found at ngdc.noaa.gov/geomag/WMM. The World Magnetic Model (WMM) used for this is updated every five years. This program provides the variation values shown on ENC, so they should always agree.
Compass navigation is another advantage of ENC over traditional paper charts still in place that are in the process of being discontinued. Most paper charts do not have the latest MAGVAR data, some based on 2010 WMM data or even earlier models.